Overview of PyTorch Distributed Training
Summary
本文提供了一个关于PyTorch分布式训练能力的全面概述,涵盖了torch.distributed的核心组件,深入探讨了Distributed Data-Parallel Training (DDP)、RPC-Based Distributed Training和**Collective Communication (c10d)**等内容。
Introduction
torch.distributed主要有三种核心组件:
- Distributed Data-Parallel Training (DDP):分布式数据并行训练,通过在多个计算设备上并行处理数据来加速训练过程
- RPC-Based Distributed Training (RPC):基于RPC(Remote procedure call)的分布式训练,对DDP的补充,尤其适用于模型不容易直接使用数据并行训练的情境。
- Collective Communication (c10d):通信库,是DDP和RPC的基础。一般情况下,用户不会直接调用此库,而是使用DDP和RPC直接进行分布式训练。
Data Parallel Training
数据并行训练主要有以下几种case:
- 单机多卡训练(DP):通过DP利用单机多GPU进行训练加速,易于使用代码改动量小,但性能较低(单process多threads受GIL影响)
- 单机多卡训练(DDP):通过DDP利用单机多GPU进一步加速,改动代码量多一些
- 多机多卡训练(DDP + launching_script):如果想利用多机多卡进行训练,使用此方式
- 多机多卡训练+动态资源调整/错误恢复:使用torch.distributed.elastic
torch.nn.parallel.DistributedDataParallel
相比于DP,DDP需要额外步骤来启动,例如调用init_process_group。
通过多进程并行,DDP规避了GIL的限制。此外,DDP时模型只会在构建阶段被广播一次(DP每次都会在前向运算时广播),在后续训练阶段不再需要广播,而是同步模型参数更新。
因此DDP的性能会比DP要高很多
运行DDP的简单例子:
import torch
import torch.distributed as dist
import torch.multiprocessing as mp
import torch.nn as nn
import torch.optim as optim
from torch.nn.parallel import DistributedDataParallel as DDP
def example(rank, world_size):
# create default process group
dist.init_process_group("gloo", rank=rank, world_size=world_size)
# create local model
model = nn.Linear(10, 10).to(rank)
# construct DDP model
ddp_model = DDP(model, device_ids=[rank])
# define loss function and optimizer
loss_fn = nn.MSELoss()
optimizer = optim.SGD(ddp_model.parameters(), lr=0.001)
# forward pass
outputs = ddp_model(torch.randn(20, 10).to(rank))
labels = torch.randn(20, 10).to(rank)
# backward pass
loss_fn(outputs, labels).backward()
# update parameters
optimizer.step()
def main():
world_size = 2
mp.spawn(example,
args=(world_size,),
nprocs=world_size,
join=True)
if __name__=="__main__":
# Environment variables which need to be
# set when using c10d's default "env"
# initialization mode.
os.environ["MASTER_ADDR"] = "localhost"
os.environ["MASTER_PORT"] = "29500"
main()RPC-Based Distributed Training
对于DDP无法处理的一些情况,例如参数服务器范式(Parameter Server Paradigm,分为工作节点和参数服务器节点,工作节点负责模型计算,参数服务器节点PS负责存储模型参数)、分布式流水线并行(distributed pipeline parallelism,也称作分布式管道并行,指模型被划分为多个阶段,分布在多个节点上,第一个阶段处理完发送到下一个阶段,以此类推)等,RPC就能够派上用场了。
torch.distributed.rpc包含四个主要支柱:
- rpc:RPC提供了在远程worker上执行函数的能力
- RRef:Remote REFerence,帮助管理remote object的生命周期
- Distributed_Autograd:扩展autograd引擎,实现多机器autograd计算
- Distributed_Optimizer:分布式优化器,将分布式autograd引擎计算得到的梯度分发给其他worker来计算参数更新。
一个简单的RPC例子:
import os
import torch.distributed.rpc as rpc
import torch.multiprocessing as mp
def remote_square(x):
print(f"Received {x} from caller. Computing its square...")
return x * x
def worker(rank, world_size):
rpc.init_rpc(
name=f"worker{rank}",
rank=rank,
world_size=world_size
)
rpc.shutdown()
def caller(rank, world_size):
rpc.init_rpc(
name=f"caller{rank}",
rank=rank,
world_size=world_size
)
response = rpc.rpc_sync(to="worker1", func=remote_square, args=(5,))
print(f"Caller received: {response}")
rpc.shutdown()
def main(rank, world_size):
os.environ["MASTER_ADDR"] = "127.0.0.1"
os.environ["MASTER_PORT"] = "29502"
if rank == 0:
caller(rank, world_size)
else:
worker(rank, world_size)
if __name__ == "__main__":
world_size = 2
mp.spawn(main, args=(world_size,), nprocs=world_size)Collective Communication (c10d)
Collective Communication是多个进程或工作节点间同步和交换数据的基础,支持DDP和RPC
基础操作
- send/isend:点对点发送数据
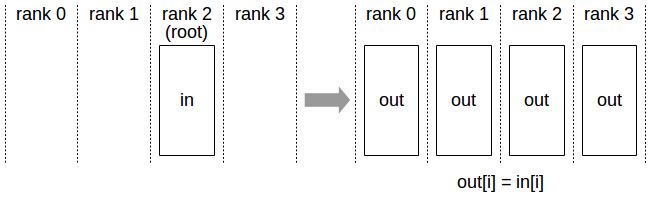
- broadcast:一个节点数据广播到所有节点上
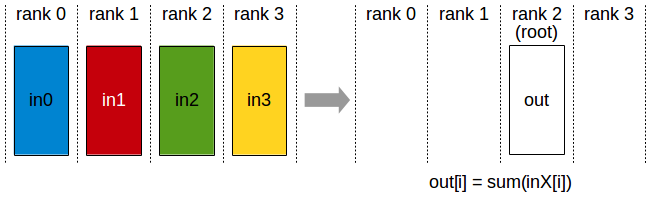
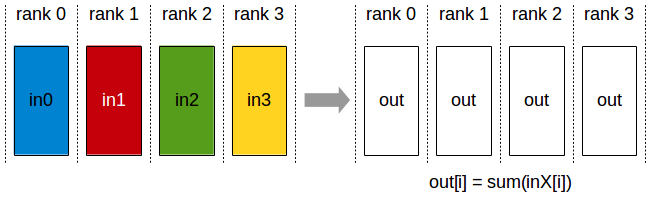
- reduce:所有节点数据通过某种运算(比如求和)reduce到一个指定节点
- scatter:划分某个节点的数据为多份,分别发送给其他节点
- gather:所有节点数据汇集到一个节点上
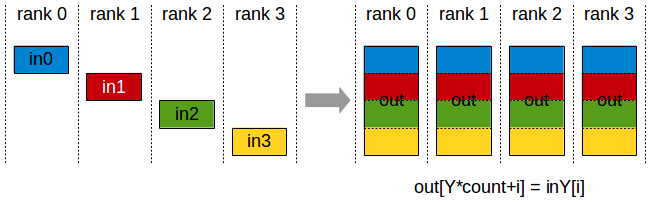
- all-gather:所有节点数据汇集,并分发到所有节点
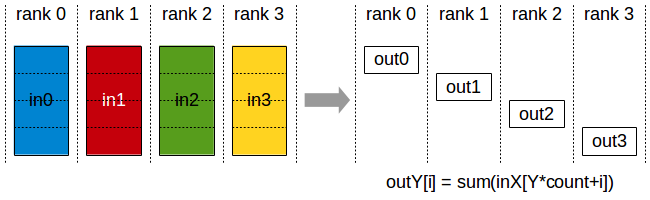
- reduce-scatter:与reduce操作类似,但结果会划分到多个节点上
- all-reduce:所有节点数据进行reduce运算,结果分发到所有节点(相当于reduce-scatter + all gather,在环形算法中轮转消耗2(n-1)的时间片)
- all-to-all:每个节点按照自己的列表发送和接收其他节点的不同数据
collective communication APIs如all-reduce、all_gather等用于DDP训练,P2P communication APIs如send、isend等用于RPC训练
All Reduce实例
初始状态:
| P0 | P1 | P2 |
|---|---|---|
| a0 | b0 | c0 |
| a1 | b1 | c1 |
| a2 | b2 | c2 |
先做reduce scatter:
一个时间片后:
| P0 | P1 | P2 |
|---|---|---|
| a0 | b0+a0 | c0 |
| a1 | b1 | c1+b1 |
| a2+c2 | b2 | c2 |
一个时间片后:
| P0 | P1 | P2 |
|---|---|---|
| a0 | b0+a0 | c0+b0+a0 |
| a1+b1+c1 | b1 | c1+b1 |
| a2+c2 | b2+a2+c2 | c2 |
然后开始做 all gather,再一个时间片后:
| P0 | P1 | P2 |
|---|---|---|
| c0+b0+a0 | b0+a0 | c0+b0+a0 |
| a1+b1+c1 | a1+b1+c1 | c1+b1 |
| a2+c2 | b2+a2+c2 | b2+a2+c2 |
再一个时间片后:
| P0 | P1 | P2 |
|---|---|---|
| c0+b0+a0 | c0+b0+a0 | c0+b0+a0 |
| a1+b1+c1 | a1+b1+c1 | a1+b1+c1 |
| b2+a2+c2 | b2+a2+c2 | b2+a2+c2 |
通信完成,假设我们有N个结点,需要all reduce的梯度总量为K,那么每个all reduce的通信总量为 2 * K/N * (N-1)
通信后端
c10d支持多种后端,包括:
- Gloo:开源通信库,CPU默认后端,跨平台并拥有可靠性能,不需要特定系统依赖
- NCCL(NVIDIA NCCL (NVIDIA Collective Communications Library) :多GPU、多节点通信库,给NVIDIA GPU提供了最佳性能
- NVLink:单节点内多GPU高速通行
- InfiniBand(IB):节点间高速传输(RDMA,Remote Direct Memory Access 的一部分)
- PCIe(Peripheral Component Interconnect Express):fallback通行机制,较慢。
- 先建立GPU拓扑图,然后基于上述三种通信机制实现环形(最普遍)/树形/网格算法实现通信。
- MPI(Message Passing Interface) :用于在多计算节点上进程间消息传递。MPL不是pytorch默认后端,需要额外安装与适配才能使用。
一般地,CPU用Gloo,GPU用NCCL,如果你对MPI很熟悉且已经正在使用MPI通信,那么考虑额外安装MPI。
扩展阅读——Pytorch Distributed架构
C10D 与 DistributedDataParallel
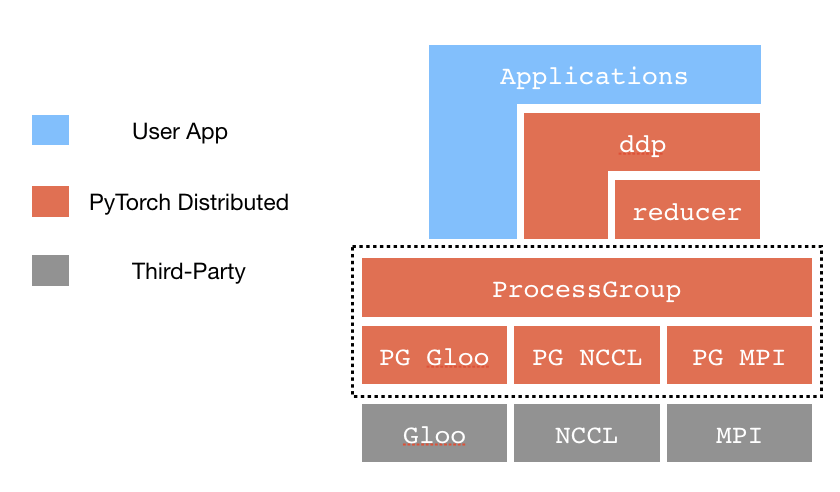
Process Groups(PG):管理进程间通信,暴露了一系列通信API,如
broadcast、send、all-reduce等。Store:一个键值存储系统,用于进程间共享信息。包含
FileStore(一个共享文件存储键值对)、TCPStore(使用TCP服务器存储)、HashStore(在内存中存储,用于单进程模式或测试),以及第三方store如etcd、Redis等。Reducer:负责收集各个设备上的模型梯度,进行reduce运算(如平均计算),然后将梯度广播回所有节点,确保模型参数更新一致。Reducer使用了一种Bucketing策略,将多个参数的梯度组合在一起然后整网一次广播提高带宽利用率。
RPC Framework
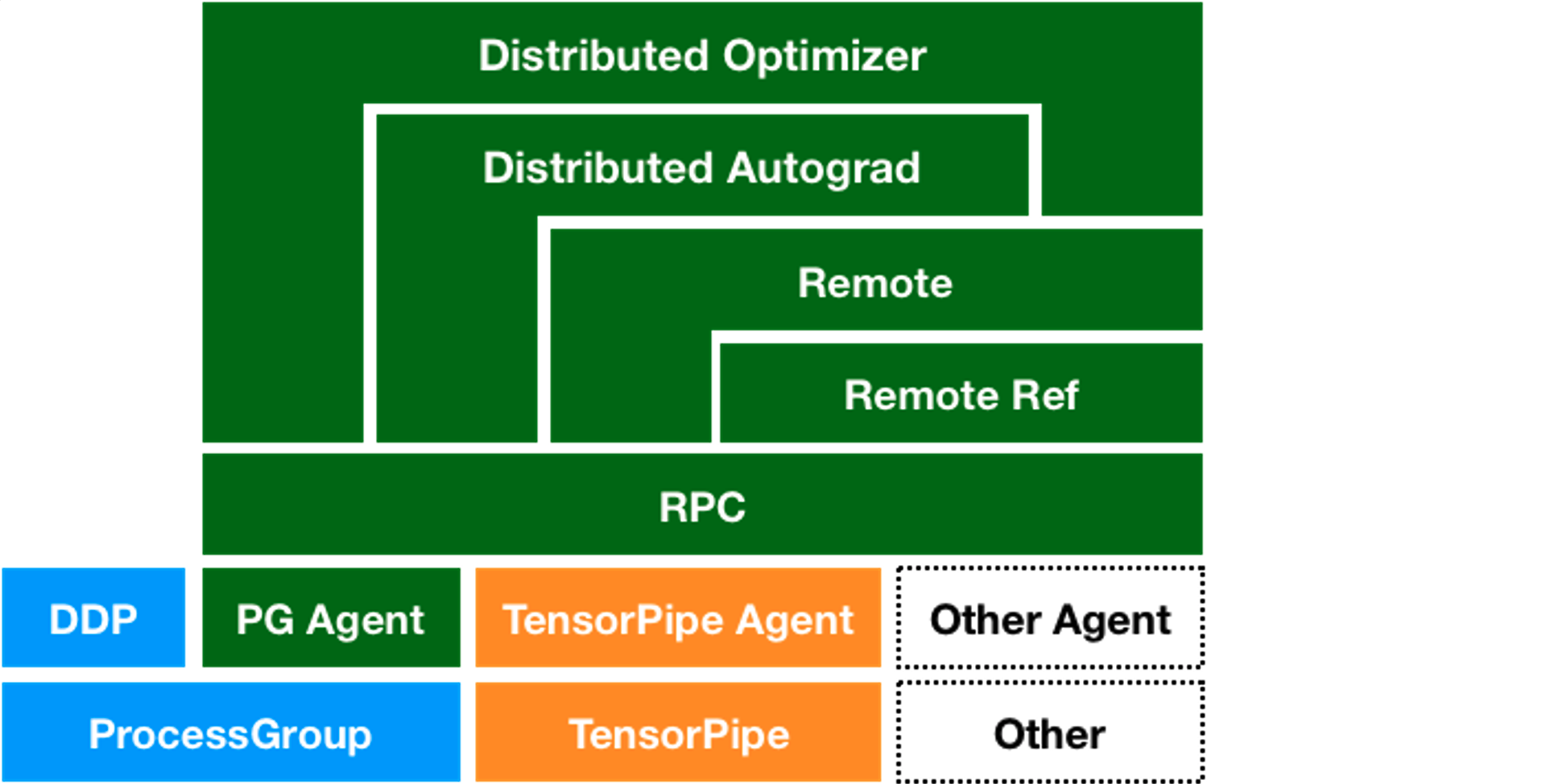
RPC Agents:为了支持不同通信协议和后端,pytorch提供了Agent的抽象,负责处理跨进程消息传递。包含ProcessGroupAgent(基于c10d::ProcessGroup实现)、TensorPipeAgent(专门为tensor通信优化的agent)等