Ray Introduction
Summary
This article introduces the basic concepts of Ray.
To be translated
Oh Sorry!
This blog has’t been translated to English, please wait for a little while…
零、基本介绍
ray是UC Berkeley RISE Lab开发的开源通用分布式计算框架,可以简单通用的 API 灵活运行计算密集型 Python 相关代码(从分布式训练、超参数调整到深度强化学习和生产模型服务。)
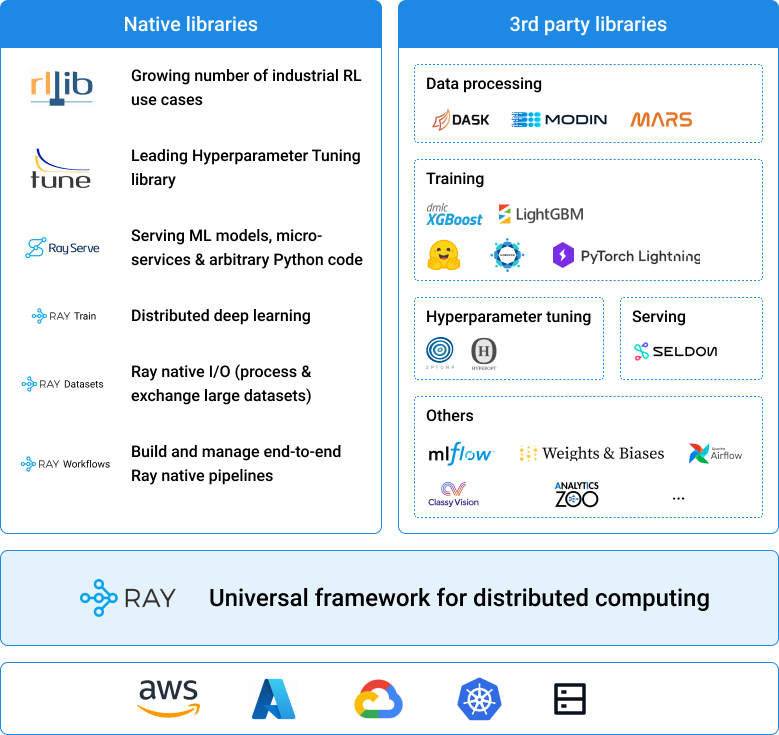
Ray Core 为构建分布式应用程序提供了简单、通用的 API。
Ray 的本地库和工具支持运行复杂的 ML 应用程序。
可以将这些应用程序部署在任何主要的云提供商上,包括 AWS、GCP 和 Azure,或者在自己的服务器上运行它们。
Ray 还拥有不断增长的社区集成生态系统,包括 Dask、MARS、Modin、Horovod、Hugging Face、Scikit-learn、lightgbm 等。
一、实例导入
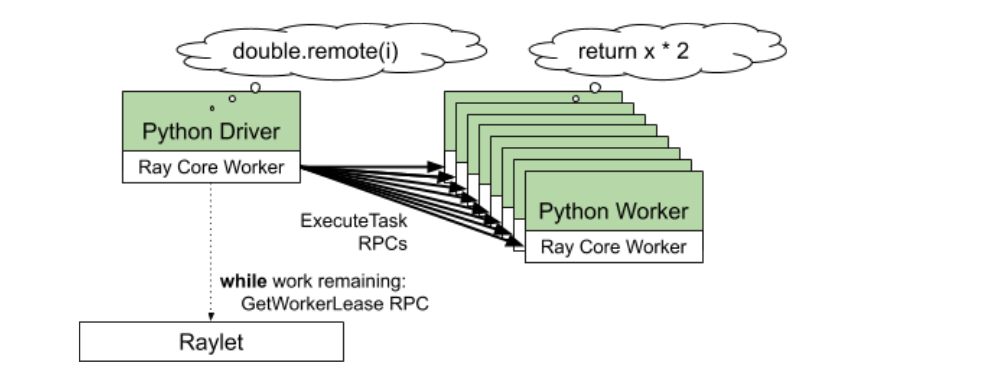
1、Hello World
import ray
import time
# Start Ray.
ray.init()
@ray.remote
def f(x):
time.sleep(1)
return x
# Start 4 tasks in parallel.
result_ids = []
for i in range(4):
result_ids.append(f.remote(i))
# Wait for the tasks to complete and retrieve the results.
# With at least 4 cores, this will take 1 second.
results = ray.get(result_ids) # [0, 1, 2, 3]
print(results)ray.get()的本质是从ObjectStore里获取对象。先看本地有没有,本地没有去其他节点的ObjectStore里找,其他节点有则pull到本地。在ObjectStore查到对象后,worker通过共享内存的方式将对象内存地址映射到自己的进程空间中,并反序列化为python对象。
建议多次使用/获取的变量通过ray.put()的方式写入,以减少作为函数参数时自动生成放入ObjectStore的数据量。
# 对象x往ObjectStore拷贝里10次
[f.remote(x) for _ in range(10)]
# 对象x仅往ObjectStore拷贝1次
x_id = ray.put(x)
[f.remote(x_id) for _ in range(10)]2、任务阻塞
import numpy as np
import ray
@ray.remote
def create_matrix(size):
return np.random.normal(size=size)
@ray.remote
def multiply_matrices(x, y):
return np.dot(x, y)
x_id = create_matrix.remote([1000, 1000])
y_id = create_matrix.remote([1000, 1000])
z_id = multiply_matrices.remote(x_id, y_id)
# Get the results.
z = ray.get(z_id) # 注意:它不会直接被执行,而是等待x, y执行后才执行3、actor
actor是python类实例化的产物,可以做到多个任务之间共享状态甚至调用方法(分布式下一样如此)
import ray
ray.init()
@ray.remote
class Counter(object):
def __init__(self):
self.n = 0
def increment(self):
self.n += 1
def read(self):
return self.n
counters = [Counter.remote() for i in range(4)]
[c.increment.remote() for c in counters]
refs = [c.read.remote() for c in counters]
print(ray.get(refs))二、设计
1、Overview
A、API philosophy
- 提供简单、通用的API给用户
- 通过参数配置,给用户对系统更细粒度的控制,如
task placement,fault handling, 和application lifetime.
B、System scope
通用分布式应用开发组件,支持:
- coarse-grained elastic workloads(弹性工作负载):Serverless Computing
- machine learning training:(例如, Ray Tune(超参数优化框架), RLlib(可扩展的强化学习库), RaySGD)
- online serving (例如, Ray Serve)
- data processing (例如, Modin, Dask-on-Ray, MARS-on-Ray)
C、System design goals
- API simplicity and generality
- performance (low overhead 低开销 and horizontal scalability 水平扩展) 基于gRPC,却又可以实现原生grpc的效率;相比单独直接使用gRPC,ray基于分布式共享内存和分布式执行调用起来更简单
- reliability ray引入了distributed reference counting protocol来保证内存安全
D、Related systems
- Cluster Orchestrators:可以运行在Cluster Orchestrators(如k8s、slurm)之上,提供更轻量的基元即task和actor,而不是container和service。(备注:在slurm上运用ray并不直观,需要多个srun命令启动一个ray集群,包括选择一个头结点,再让worker通过主机名和ip地址(网络通信)连到头结点,之后才能执行使用ray的python脚本。每个任务需要在单独的节点上运行(tasks-per-node=1)。其中,需要重点注意端口绑定和ip绑定,用户需要避免冲突。)
- Parallelization Frameworks:相对
multiprocessing或celery,更高效且支持内存共享 - Data Processing Frameworks:和
Spark,Flink,MARS, orDask相比,提供更底层灵活的API,同时没有限定数据结构 - Actor Frameworks:和
ErlangandAkka相比,ray集成现有编程语言可以用原生语言库,可以显式进行无状态任务并行计算,且可以在actor间内存共享 - HPC Systems(高性能计算系统):相对HPC系统以message接口通信,虽然更灵活,但用户使用成本更高。
2、Architecture Overview
A、Application concepts
- task:无状态的函数,或者有状态的方法,
@remote()修饰,用ray.remote()调用,返回ObjectRef以获取返回值 - Object:不可变的对象,可以用
ObjectRef获取 - Actor:有状态的类对象,传输时必须是一个实例
- driver:运行
ray.init()的初始环境,提交任务 - Job:从一个driver中生成的tasks, objects, and actors的集合
B、Design
Global Control Store (GCS) :管理 system metadata,为了保障性能,GCS只控制不常用但是会被所有其他节点都用到的信息,如node membership等。
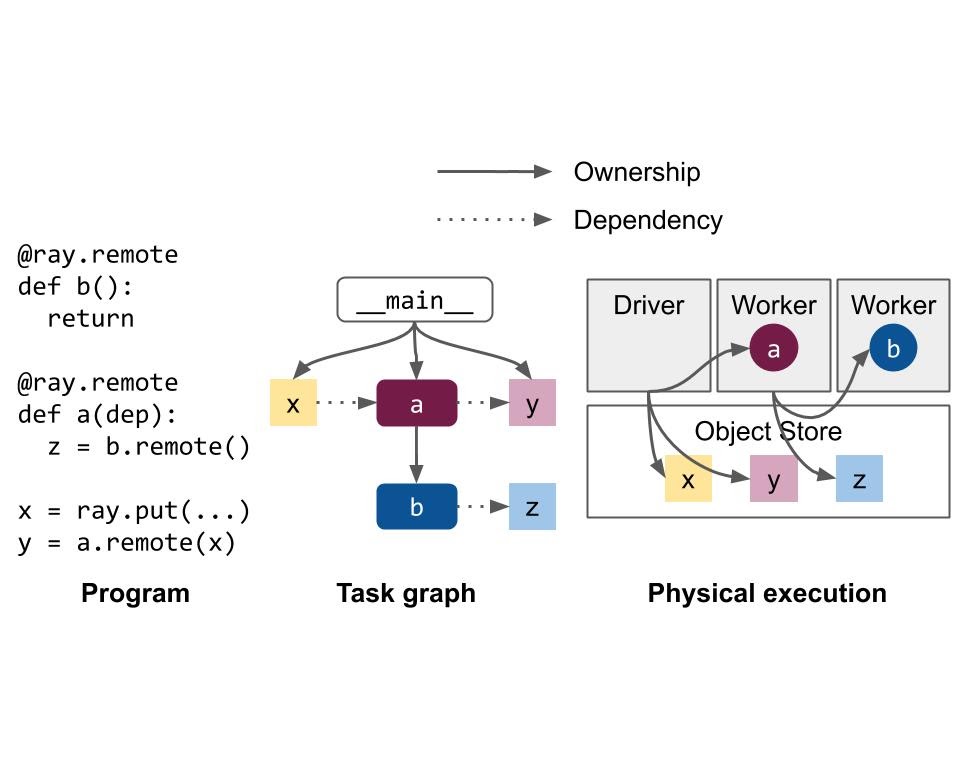
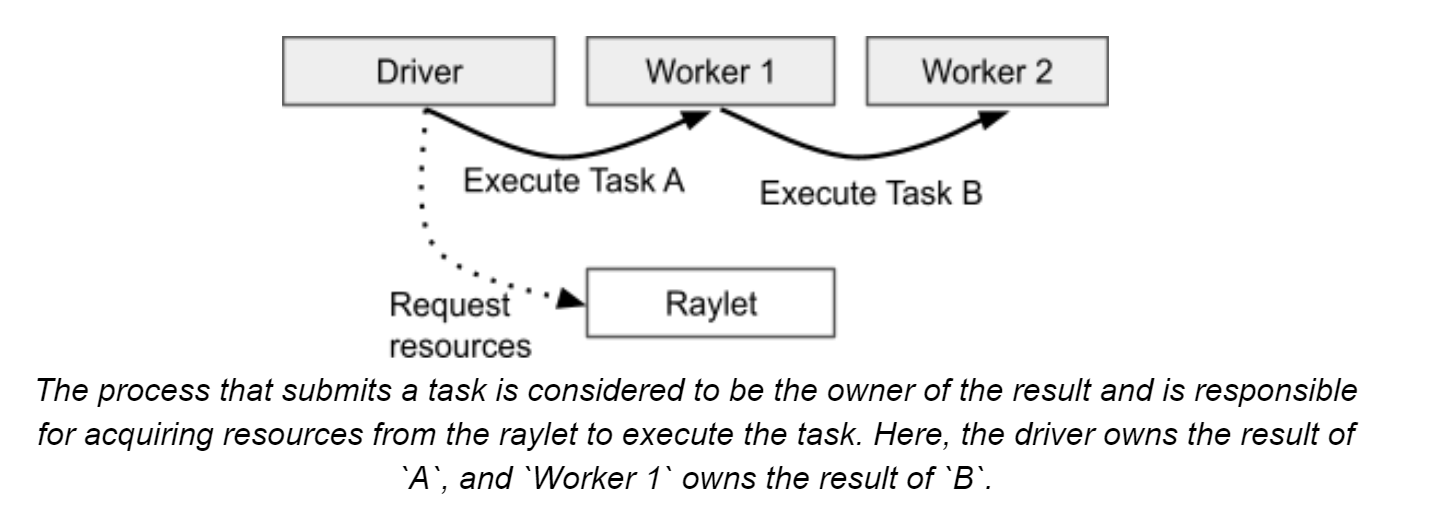
a、Ownership
ownership是一个去中心化的概念,每个worker process作为owner管理自己提交的任务(向raylet申请资源、确保任务正常执行)和objectRef返回值的获取。
相比于Ray versions <0.8(GCS负责管理object相关的metadata,意味着GCS在大多数系统操作的关键路径上),有以下好处:
- Low task latency (~1 RTT(Round-Trip time, <200us)
- High throughput(~10k tasks/s per client; linear scaling to millions of tasks/s in a cluster):在嵌套函数调用中,system metadata很自然地被分包
- Simplified architecture:owner拥有了相关的objects和system metadata
- Improved reliability:任务失败可以迅速定位到其owner
当然也有缺点:
- object的owner必须reachable,如果owner挂掉,object会直接丢失
- 目前ownership不能在worker间传递
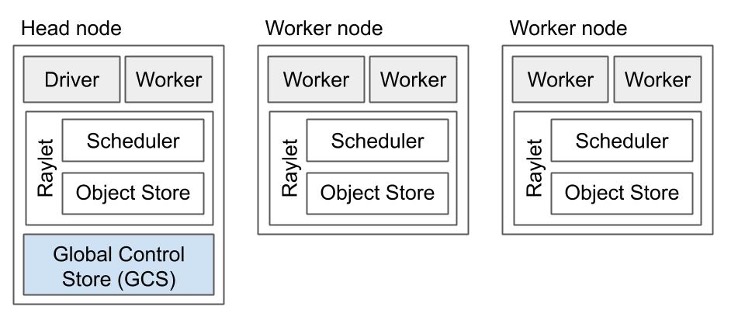
b、Components
每个结点有:
- 一个或多个的worker processes,每个process有:
- An ownership table:所有object的位置和计数等
- An in-process store:存储较小的object
- raylet:对于所有process共享,它有:
- A scheduler:处理资源、填充任务参数等
- A shared-memory object store (Plasma Object Store):用于存储和传输较大的object
头结点额外有:
- The Global Control Store (GCS)
- The driver process:执行top-level application的,如
__main__,能够提交任务但不能直接执行。
c、Connecting to Ray
以下三种类型:
- 本地起集群(只有一个节点的ray实例):
ray.init() - 本身就在一个ray集群中(在某个结点上),连到这个ray集群:
ray.init(address=<GCS addr>) - 连到一个远端的machine:
ray.util.connect(),注意这个因为网络延迟可能比较慢。
d、Language Runtime
底层核心(包括ownership table、in-process store、gRPC connection)使用C++开发,支持python和java高级调用
Core worker 源码:链接
包括task和actor task的分配、进程内数据存储、内存管理
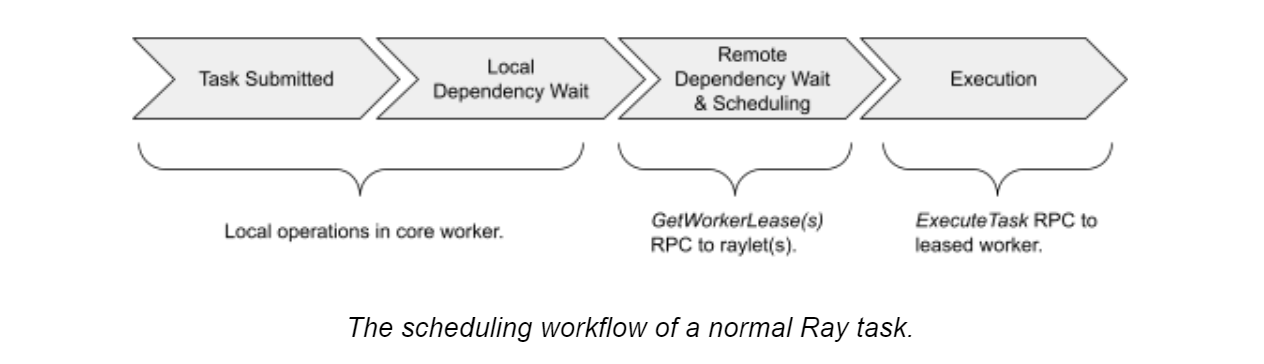
C、Lifetime of a task
一般地,由owner控制task的生命周期,包括申请资源、确保执行、获取返回值等
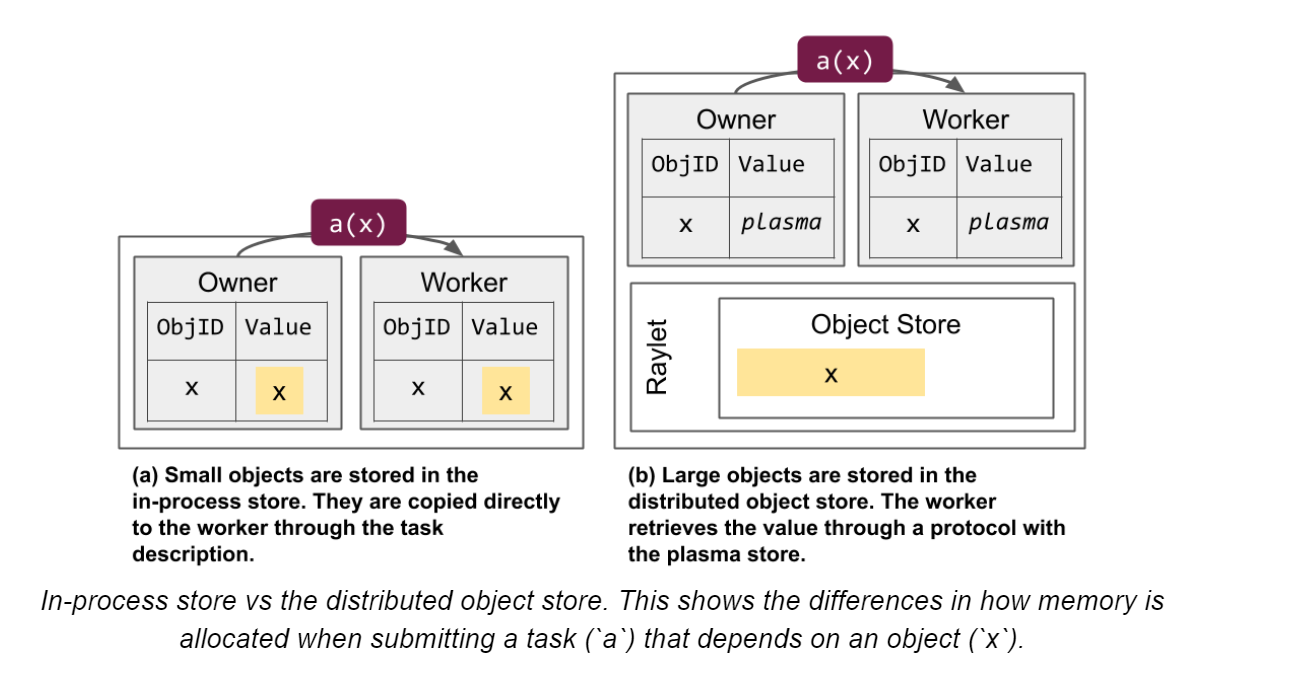
owner准备参数,一般地,参数会作为task的描述传递给worker。但如果有
objectref作为参数,那么根据object大小(100KB)区分:a、小的话会直接从owner的in-process object store里面取出放入task描述
b、大的话
scheduler会将这个object进行节点间传递,让worker可以在新节点的内存共享区获得这个object。放到一个worker node的内存共享区(plasma)后,所有当前节点worker process都能直接引用这个objectowner发现object available后,向
distributed scheduler申请资源,如果资源充足,scheduler会将合适worker的address发给ownerowner基于grpc发送task specification给worker,worker执行任务
重点:如果返回值序列化后的object较小,会直接返回给owner,owner将返回值放入in-process object store;如果返回object较大,那么worker会存储object在本地内存共享存储区并且告诉owner这些object的存储位置。
error的处理:
- 用户任务的error,那么错误会被catch并在返回值中返回
- 系统error如raylet错误,那么根据配置会进行一定次数的重试
D、Lifetime of an Object
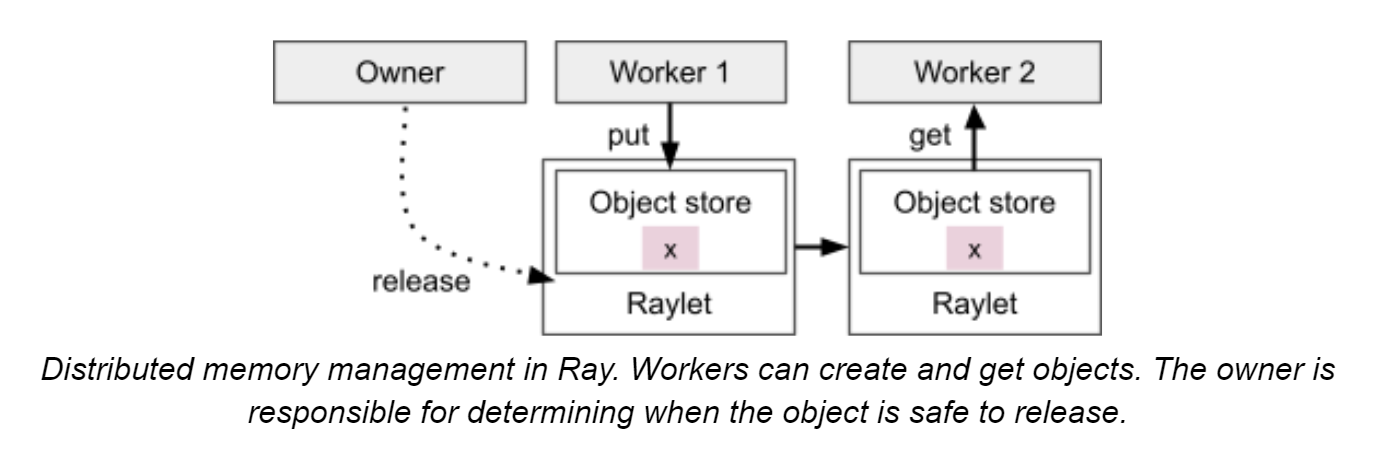
owner即创建objectRef的worker。
目前在ray中,如果owner挂掉,那么所有由objectRef尝试获取这个object的请求都会报错,即使有多份这个object的copy
每个worker对于object持有ref count,具体后文细说
如上文task生命周期所说,object根据大小会存储在owner的in-process store或者distributed object store(带有一个特殊的distributed protocol)
E、Lifetime of an Actor
不同于task的去中心化管理,actor的生命周期和metadata(IP、port等)全部由GCS管理,actor的client会存储这些metadata并通过grpc向actor发送请求。
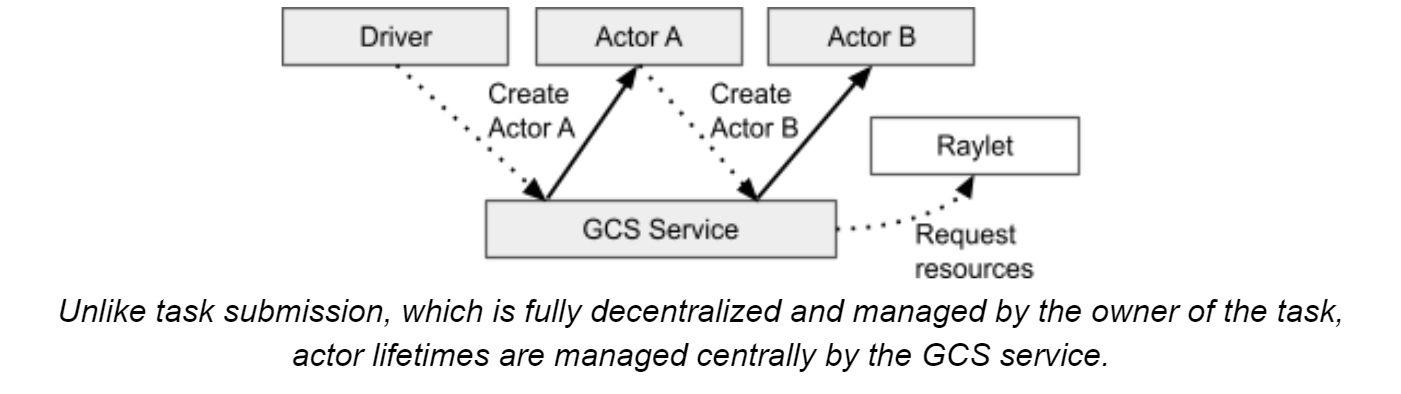
过程:
- 当在python中创建actor时(
a = cls.remote()),worker向GCS同步注册一个actor(防止worker创建actor失败,创建后worker就是异步了) - worker queue一个特殊的task(
actor creation task,相当于普通task,但有一些额外资源),处理依赖后将此任务送至GCS调度,与此同时,python获取到了actor handle,即使actor这时候并没有完全创建完毕。 - 之后在actor上的task执行如普通task一般,但有两点不同:
- 资源不再需要申请,因为actor创建时已经被保证了足够的资源
- 对于一个actor的任务的调用,顺序会与submit的一致(除非
async actor),这是因为caller在submit task时带有一个sequence number(如果多caller则无法保证顺序)
actor的清理:
creator退出/task全部执行完毕且在集群中不存在handle的时候actor自动清理。(detached actor不同,设计用于长期保留的task,可以用name来call,需要显式清理)
F、Failure Model
a、System Model
一般而言,ray worker node都是同质化的,挂掉不影响全局,但管理GCS的head node挂掉就会导致全局挂掉。现在ray团队正在努力让任何结点都可以成为head结点,提高可用性
所有结点通过heartbeats机制保持通信
GCS记录各个worker node id和状态,如果一个node挂掉,那么会分配一个新的id、重建raylet并继续使用那台机器上的物理资源。对于一个结点上的worker process,由raylet控制。如果worker process挂了,raylet会告知GCS,GCS广播这个failure来处理task失败和actor death。此外,raylet还需要释放该worker process的资源,包括CPU、GPU等集群资源和该worker process持有的object store memory
b、Application model
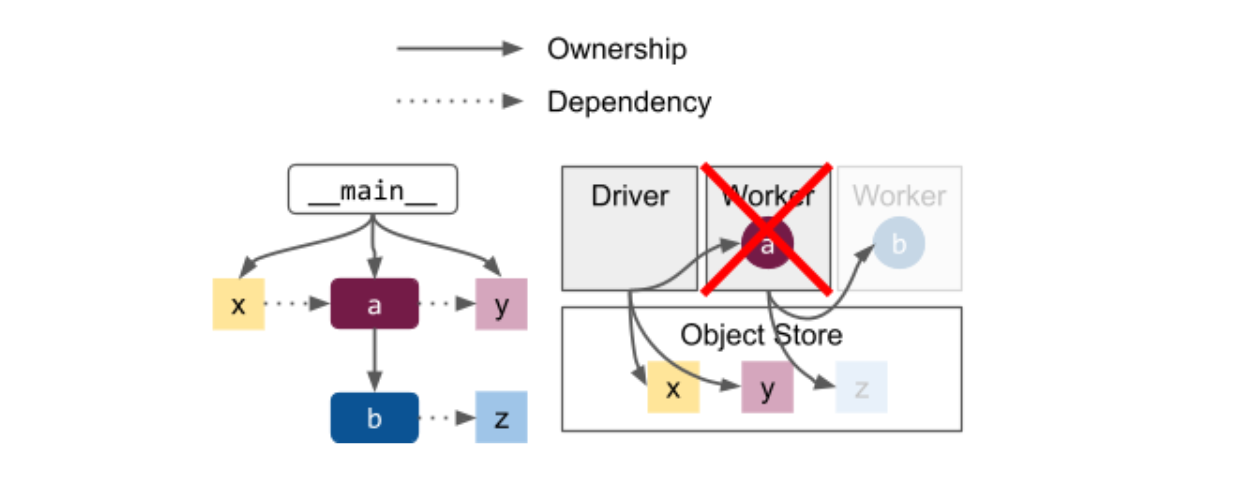
ray的objects和task与其owner fate-share(命运共享),如上图node worker a挂了,那么b和z都将丢失,所以获取b/z的行为会报错(不论b是task还是actor)。
为了减少上述问题,ray也提供了一些方法
- detached actor,生命周期长于driver,必须显式删除
- object spilling,让object生命周期长于owner
- 一些自动恢复机制,如task retries,actor restart,object reconstruction等
三、Object management
核心:区分小object和大object
- 小object从
in-process store中获取 - 大object从
plasma(object store)中获取
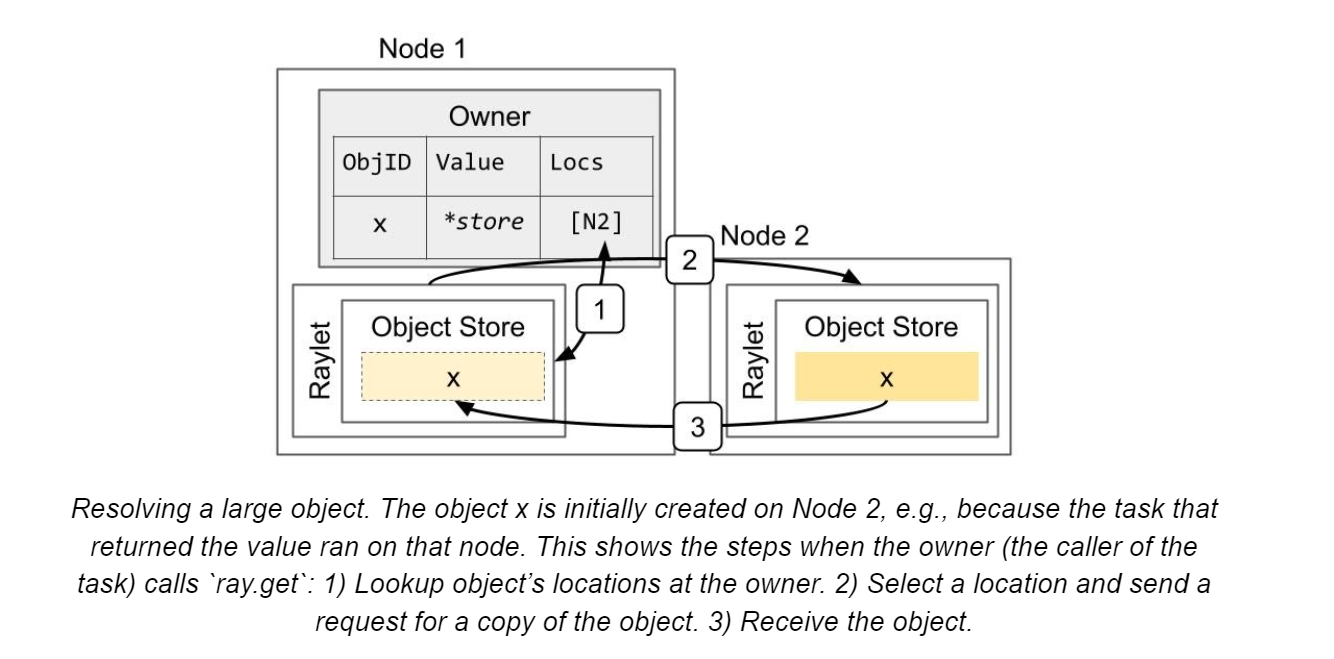
1、object resolution
objectRef定义:20-byte的identifier(task的id和task已产出的object数量拼接而成);owner的地址(包括worker process的id、IP、raylet的id等)
下图介绍了如何在节点间共享object
2、Memory management
primary copy:最初放在object store的数据,不可被驱逐(除非引用计数到了0)。其他copy在内存压力下可能会被删除
下图介绍了多个节点备份多个object,其中有一份是primary copy
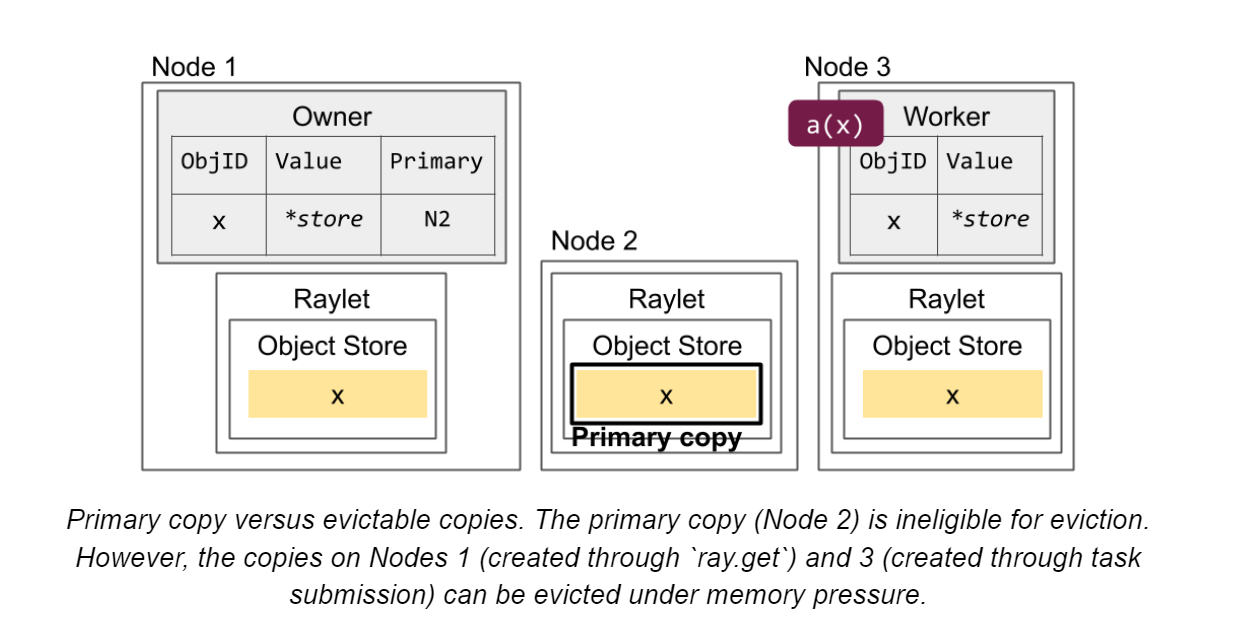
如果primary copy挂了,会在现有copy中指定一份新的
如果引用计数归0,那么所有object的copy都会被删除;
in-process store的立刻删除,object store的异步删除object可能因为以下原因在一个node上存储
- worker process调用
ray.get()或者ray.wait()(请求一个objectref的列表,可以部分返回) - 作为那个结点上执行的task的返回值,或是那个结点上正在排队的task的参数
- 那个结点上的worker process调用
ray.put() - 早先在结点上被使用,还没有删除
- worker process调用
a、Handling out-of-memory cases
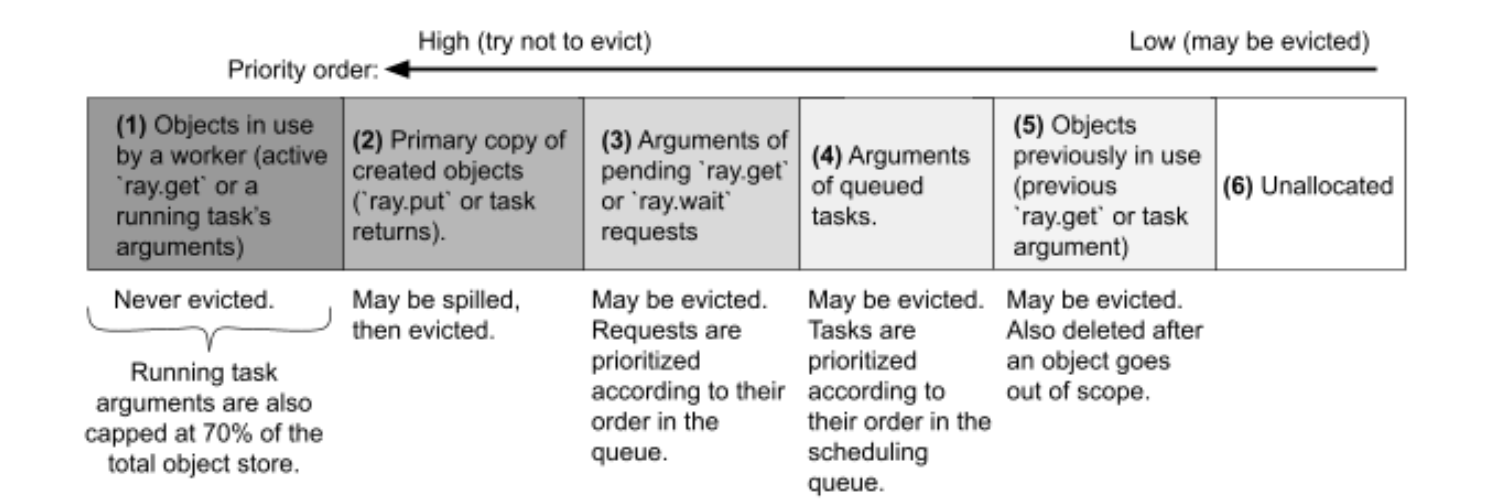
- 一般从5~3进行释放,如果还不够会启用spilling(ray1.2后)机制来支持2的释放
- 如过正在处理的1占用过多,超过默认cap 70%,那么会报错
ObjectStoreFullError - 正在处理的1中有一个特殊的概念,borrower,即虽然不是owner但正在使用的。
b、Object spilling and persistence
使用external storage来spill内存中无法存放的object,目前支持两种external storage:
- local storage(disk)
- distributed storage(S3)
overview of spilling process:
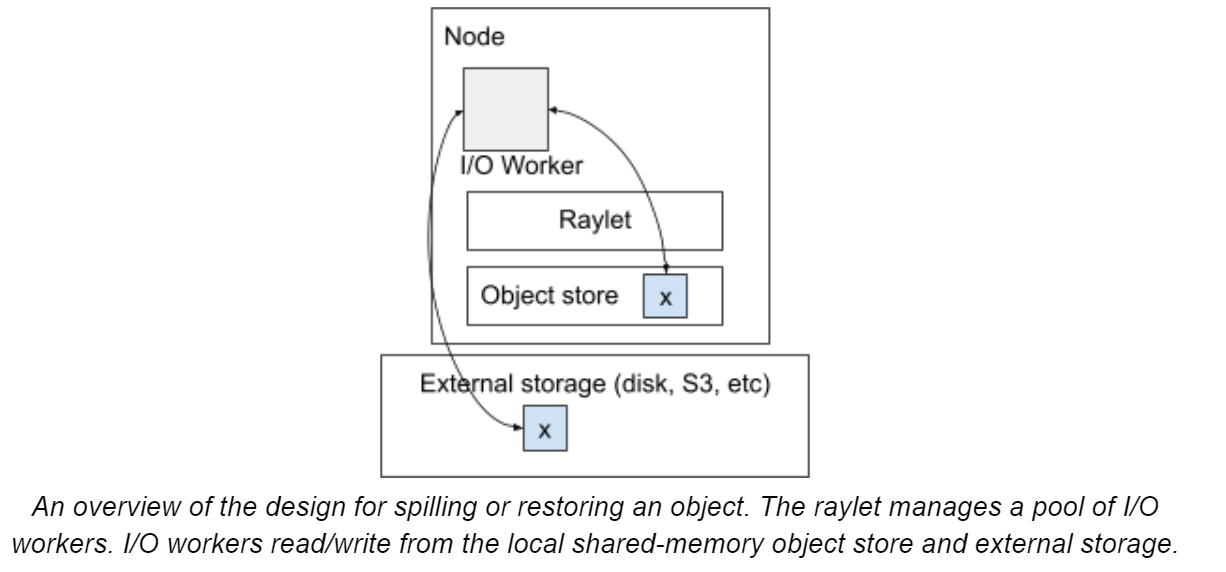
注意:可能存在object被存储在其他结点的disk上的情况,那么需要先让其他结点取到其他节点的raylet中,然后再raylet间传递过来。
值得指出的是,ray在IO到磁盘的时候为了减少多文件开销,将多个object存放在一个文件里,超过100MB才新建文件。
ray也可以支持多目录spilling,在有多个文件系统(如多个磁盘,不共享IO)的时候可能能提升效率。
已知的限制:
- 存储丢失则object丢失
- owner挂掉则object丢失(因为owner记录着位置)
- 正在使用的objects被
pinned,不会被spill,如正在使用的numpy array,只有application释放它们的时候才可以被spilled
3、Reference Counting
一般地,owner的local ref count包括:1、python引用计数。2、使用该object的pending的task数量。前者随python的objectRef对象引用计数减少而减少,后者当task成功完成时递减(application-level的exception认为是成功完成)
新的概念:borrower
例子引入
@ray.remote
def temp_borrow(obj_refs):
x = ray.get(obj_refs[0])
@ray.remote
class Borrower:
def borrow(self, obj_refs):
self.x = obj_refs[0]
x_ref = foo.remote()
temp_borrow.remote([x_ref]) # 临时借
b = Borrower.remote()
b.borrow.remote([x_ref]) # 永久借owner会持有一个list存储当前的所有的borrowers,当还有borrower在使用这个ref的时候,owner不会删除这个object。
当borrower用完该ref后,告知owner已经用完,owner将其从list中移除。(这一过程是通过long-running async RPC实现的)
a、Actor Handles
对于actor,使用一个dummy object来代表这个actor,这样可以复用object的引用计数协议
当dummy object的引用计数归0,owner将告知GCS可以安全地删除这个actor
b、Interaction with Python GC
因为python的garbage collector并不总会及时地清除无效的objectRef,这些objectRef持续保持着分布式存储区的object的生命周期,所以当存储区快满的时候,ray会自动调用gc.collect()
4、Object Loss
- object从
distributed memory中丢失:
如果该object非primary,无妨;
如果为primary,将会指定一个新的object备份作为primary
如果全部丢失,则报错。注:object reconstruction如果启用的话,ray会尝试再次执行当初创建这个object的task以获得这个object
- owner of object丢失
无解,报错。
四、Resource Management and Scheduling
ray在startup的时候会自动侦测环境的CPU、GPU和memory
1、Task scheduling (owner-to-raylet protocol)
task调度过程:
向raylet申请资源和调度到worker:
向raylet申请资源,优先分配本地worker(可并行) 如果没有足够的资源,会给driver其他节点的raylet地址,让driver请求新的raylet(即spillback scheduling)
2、Distributed scheduler (raylet-to-raylet protocol)
a、Resource accounting
- 每个
raylet跟踪local的资源,分配后资源减少,收回后资源增加 - 与GCS心跳连接(100ms interval),每次心跳告知GCS当前资源情况。GCS广播资源情况告知其他
raylet,保证eventually consistent
b、Scheduling policy
如果本地资源不足,会进行调度:
- 其他节点资源充足——
spillback scheduling如上文所提 - 其他节点资源不足——queue这个task直到有地方有资源
- 其他节点总资源不满足(如100个GPU),warning给driver并queue这个task
今后,ray可能会支持优先spillback到一个有task argument的节点
3、Autoscaler
Autoscaler(也叫Cluster Launcher)负责添加节点以满足资源需求
控制流如下:
- 计算所需的节点数(以满足pending的task、actor、placement group)
- 启动新节点(新增总节点数/当前节点数不能超过
1 + upscaling_speed这个阈值,request_resources()这个请求的除外) - 如果一个节点因timeout而idle超过5分钟,会将其剔除
ray支持多集群节点类型,包括物理实例(AWS p3.8xl GPU nodes vs m4.16xl CPU nodes等)和其他类型(IAM role, the machine image等),用户可通过Custom resources指定所需机器类型。
4、Custom Resources
创建节点时可声明节点的Custom Resources,如{“HasHardwareFeature”: 1, “HasDatasetA”: 1}.
之后task和actor便可需求这些资源,以保证确实地被调度到了这个节点上
5、Placement Groups
ray1.0后支持的功能,用于占位申请资源
6、Multi-tenancy
多租户相关
ray1.0版本后支持的功能,用于将单节点多worker设置不同的环境变量(PYTHONPATH, Java CLASSPATH等)以确保隔离,这些特殊设定的worker将不会被复用。
五、Global Control Store
ray版本<0.8时,GCS负责管理object相关的metadata,意味着GCS在大多数系统操作的关键路径上 ray版本>0.8后,GCS只负责存储关键的集群metadata如节点地址等,大幅提升效率且降低存储消耗
1、Storage
GCS目前用redis开发,目前正在试图删除redis依赖而使用mysql作为存储
- Actor Table:actor和状态的列表
- heartbeat table:clients、workers、nodes等和GCS相连的列表
- job table:正在集群running的job列表,如果job异常退出,ray会取消正在运行的关联task和actor以防止资源泄漏
- object table:维护大object(large share-memory object),ray1.3后已被移入ownership table
- profile(效能分析) table:存储Profiling events,可以理解为日志
2、persistence
ray目前使用redis作缓存而不支持持久化存储,因为redis有一个max size的限制,一些不重要的信息会被LRU eviction(Least Recently Used,最近最少使用,即未被访问时间最长的信息删除)